Pesquisadores da Université Libre de Bruxelles (ULB) desenvolveram uma arquitetura inovadora de enxame robótico inspirada no sistema nervoso humano. Essa abordagem permite que robôs se auto-organizem em subgrupos, melhorando sua coordenação ao perceberem o ambiente, se movimentarem e planejarem suas ações para cumprir missões. A ideia explora a eficácia de equipes de robôs que podem realizar tarefas do mundo real de maneira mais rápida e eficiente, como resgatar vítimas de desastres naturais ou monitorar a poluição em grandes áreas geográficas.
A pesquisa avança os conceitos de robótica em enxame, que demonstraram, nas últimas duas décadas, comportamentos coletivos eficientes sem necessidade de controle centralizado. Apesar dos avanços, a aplicação prática desses sistemas tem enfrentado desafios significativos devido às limitações da auto-organização. Muitos comportamentos precisam ser programados individualmente em cada robô, o que torna o desenvolvimento analítico demorado e difícil de adaptar a diferentes cenários.
Para superar essas dificuldades, a equipe combinou elementos de controle centralizado e auto-organizado, criando um sistema unificado. Chamado de sistema nervoso auto-organizado (SoNS), o framework permite que robôs se reestruturem em hierarquias dinâmicas durante uma missão. Essas hierarquias imitam a estrutura do sistema nervoso humano, onde funções de liderança são ocupadas temporariamente por diferentes robôs, com um “cérebro” central coordenando os esforços do grupo.
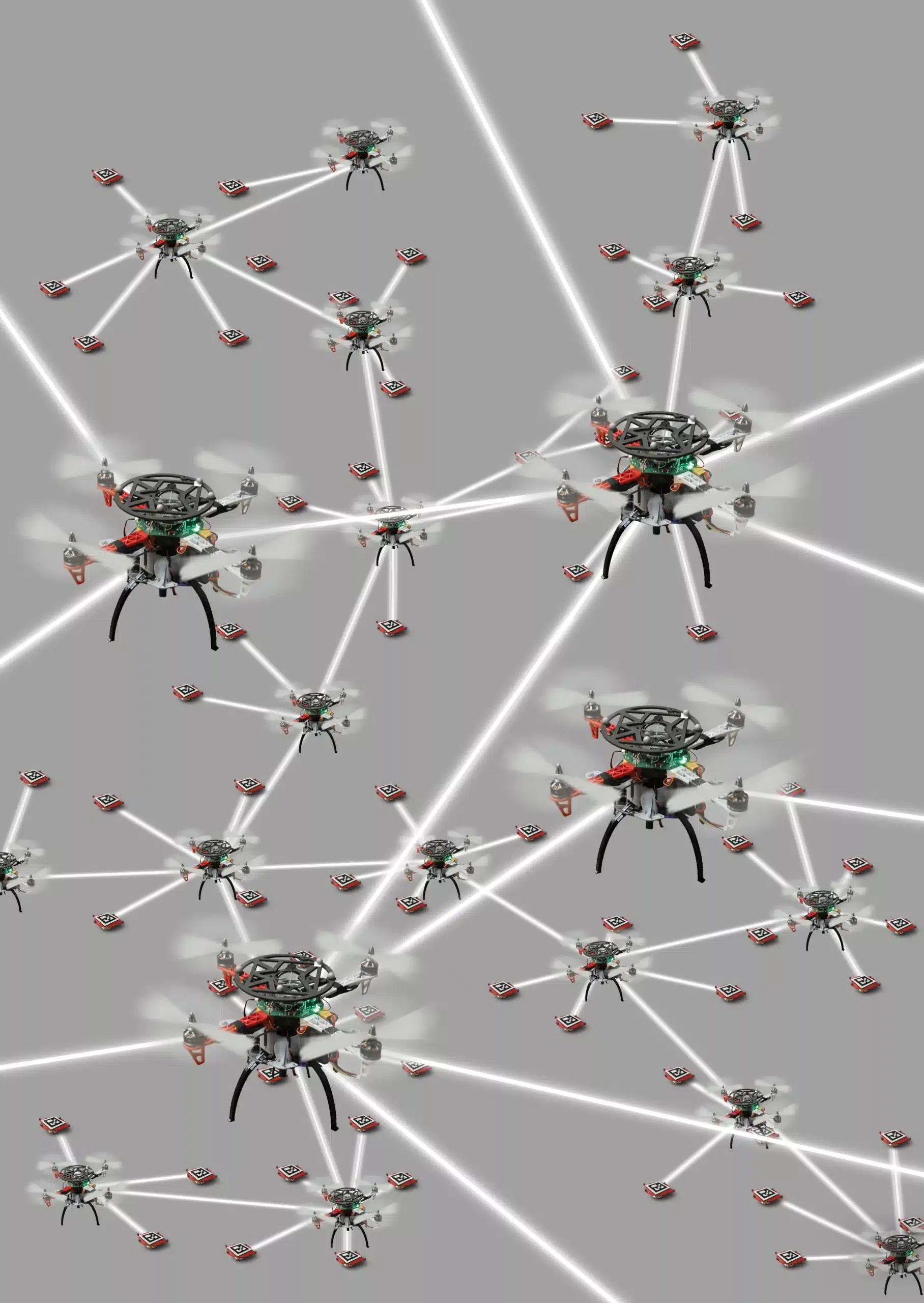
No SoNS, os robôs comunicam-se apenas com seus vizinhos imediatos, evitando congestionamentos típicos de sistemas centralizados. A arquitetura gerencia o equilíbrio entre comportamentos individuais e coletivos, permitindo que informações de sensores sejam combinadas e que comandos sejam distribuídos de forma eficiente. Essa abordagem atua como um middleware, criando redes dinâmicas em que os robôs utilizam suas capacidades como um time unificado para realizar tarefas específicas.
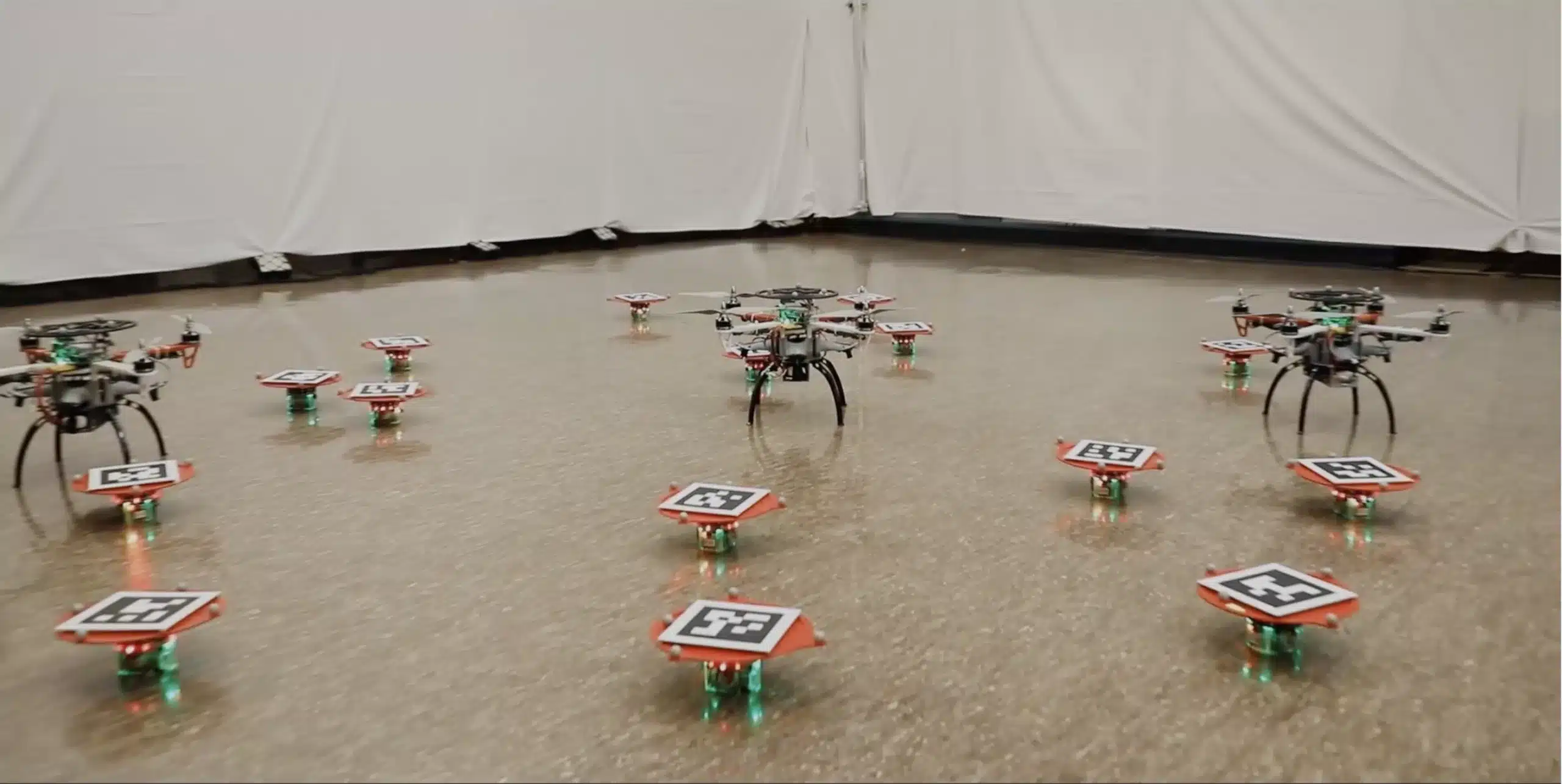
Os pesquisadores testaram o SoNS em simulações com até 250 robôs terrestres e aéreos, além de experimentos com robôs reais. Os resultados foram promissores, demonstrando que o sistema pode coordenar efetivamente grandes equipes de robôs. Essa arquitetura apresenta o potencial de viabilizar a programação de enxames como se fossem um único robô, facilitando sua transição de ambientes laboratoriais para aplicações práticas no mundo real.
No futuro, a equipe pretende refinar o SoNS, ampliando suas capacidades para incluir aprendizado online e planejamento autônomo de missões. Além disso, mais testes serão conduzidos em diferentes cenários, buscando aprimorar ainda mais a aplicabilidade desse framework revolucionário. O objetivo é consolidar o uso de robôs em enxames como ferramentas versáteis e eficientes para resolver problemas complexos no mundo real.