Um grupo de pesquisadores de diferentes instituições desenvolveu um robô inspirado no besouro-esterco, projetado para imitar suas habilidades únicas. Esses besouros possuem duas características notáveis: um padrão de locomoção distinto entre criaturas de seis patas e a capacidade de manipular objetos muito maiores que o próprio corpo. Os resultados desse trabalho foram publicados na revista científica Advanced Science, onde os autores detalham os motivos do projeto e os testes realizados com o robô.
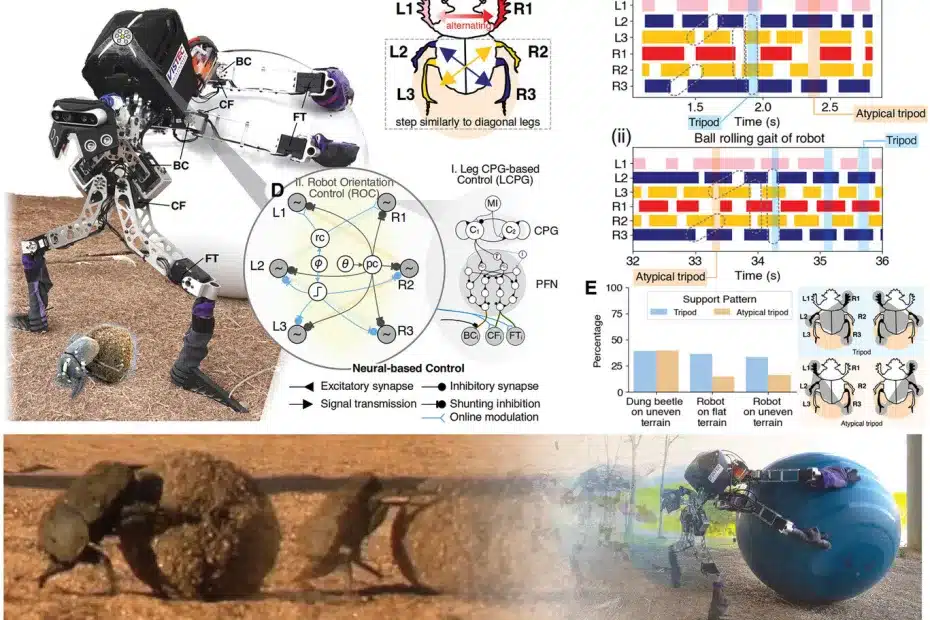
Os besouros-esterco se destacam por sua estratégia peculiar de transporte, utilizando as patas superiores para envolver e estabilizar objetos grandes, enquanto as patas inferiores fornecem força para empurrar. Essa habilidade os torna únicos no reino animal. Os pesquisadores acreditam que replicar essa técnica em robôs poderia abrir novas possibilidades em termos de design e funcionalidade, especialmente para tarefas que requerem manipulação eficiente de objetos grandes.
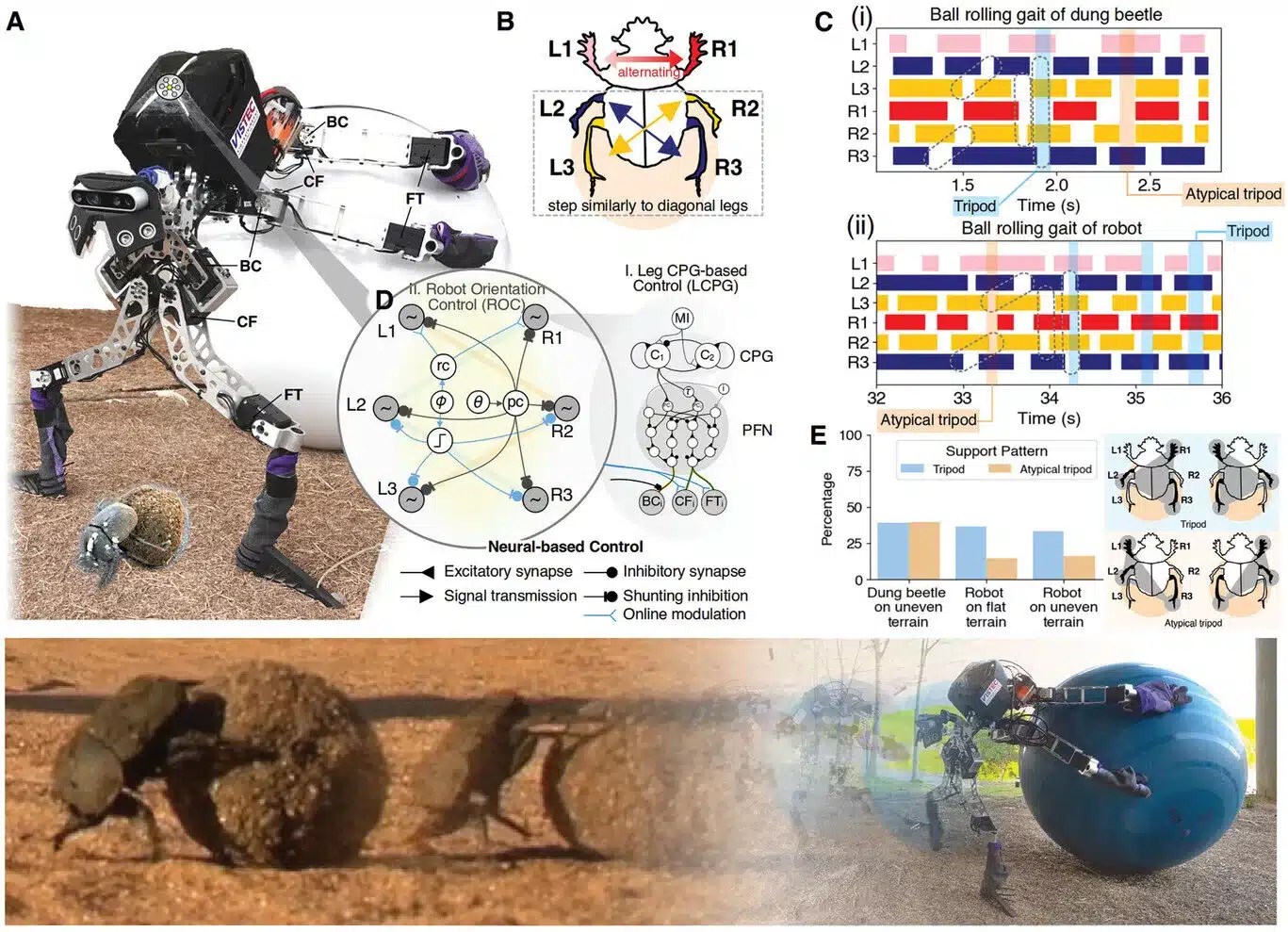
A construção do robô começou com modificações em projetos baseados no bicho-pau, ajustados para reproduzir os movimentos do besouro-esterco. Diferentemente de outros robôs modernos que dependem de aprendizado de máquina para programar comportamentos, a equipe adotou uma abordagem modular baseada em controle neuronal. Essa estratégia utilizou dois comportamentos principais: movimentos de inclinação e rolagem nas patas superiores, combinados com biomecânica simplificada para as patas inferiores. O robô resultante foi batizado de ALPHA.
Nos testes, o robô demonstrou alta eficiência ao empurrar uma bola oca para posições específicas. Além disso, mostrou-se versátil, sendo capaz de transportar materiais dentro da bola, o que sugere aplicações práticas além da simples manipulação de objetos. Esse desempenho comprova o potencial do design inspirado no besouro-esterco em situações que exigem força e precisão em espaços reduzidos.
Os pesquisadores destacaram o potencial do ALPHA para missões de busca e resgate, já que sua estrutura permite movimentação ágil em terrenos irregulares e desconhecidos. Apesar de reconhecerem a necessidade de melhorias no design, os cientistas acreditam que o estudo pode inspirar novas abordagens em robótica, baseadas na adaptação de características naturais de locomoção e manipulação.
Esse projeto destaca a importância de buscar soluções na natureza para problemas tecnológicos complexos. Ao combinar biomimética com engenharia, os pesquisadores mostraram como formas naturais de locomoção podem revolucionar o desenvolvimento de robôs para aplicações práticas, abrindo caminho para inovações futuras no campo da robótica multitarefa.