Traduzido por Julio Batista
Original de David Nield para o ScienceAlert
Seu pequeno robô é realmente tão pequeno se for maior que a largura de uma moeda? Uma equipe de cientistas construiu o que é agora o menor robô ambulante controlado remotamente, com apenas meio milímetro de largura.
Robôs extremamente pequenos têm uma série de usos potenciais, desde ajudar em procedimentos cirúrgicos até consertar máquinas em espaços onde uma chave inglesa não caberia. Quanto menores eles ficam, em mais cenários eles podem ser usados.
Este robô, embora ainda não esteja pronto para começar a sair pelo mundo e fazer reparos, é realmente impressionante.
Parece e se move como um caranguejo-de-rocha-do-atlântico em miniatura, uma forma escolhida por um “capricho criativo”, segundo os pesquisadores. As técnicas que eles desenvolveram podem, de fato, ser usadas para desenvolver pequenos robôs em praticamente qualquer formato necessário.
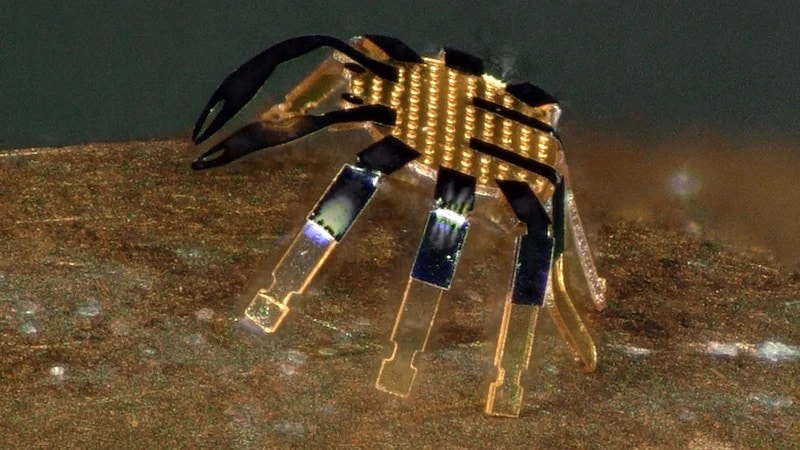
“Nossa tecnologia permite uma variedade de modalidades de movimento controlado e pode se locomover com uma velocidade média de metade do comprimento do corpo por segundo”, disse o engenheiro mecânico Yonggang Huang, da Universidade do Noroeste, em Illinois (EUA).
“Isso é muito desafiador para conseguir em escalas tão pequenas para robôs terrestres.”
A tecnologia na qual o robô se baseia foi originalmente desenvolvida há oito anos e não é diferente de um livro de pop-up: as peças do robô são fixadas em um substrato de borracha esticado e, quando o material é relaxado, o dispositivo aparece em sua forma.
Ao calibrar cuidadosamente as peças de base, a forma do robô pode ser controlada com precisão. Uma abordagem semelhante é usada com as partes móveis do robô, que são feitas de um material de liga com memória de forma. Esses materiais alternam entre duas formas diferentes, dependendo de estarem ou não sendo aquecidos.
Lasers, atuando como controle remoto, são usados para aquecer partes específicas do robô – à medida que essas partes se transformam em uma forma diferente, elas impulsionam o caranguejo para frente. Não há necessidade de uma fonte de energia ou um motor, e uma fina camada de vidro garante que os componentes voltem à sua forma original à medida que esfriam.
“Como essas estruturas são tão pequenas, a taxa de resfriamento é muito rápida”, disse o cientista de materiais John Rogers, da Universidade do Noroeste. “Na verdade, reduzir o tamanho desses robôs permite que eles funcionem mais rápido.”
Ao apontar os lasers para diferentes seções do robô-caranguejo, os pesquisadores são capazes de definir a direção da locomoção. Ao ajustar a frequência da varredura a laser, a velocidade de movimento do robô também pode ser modificada.
Este é o próximo passo em uma tendência que faz o robôs ficarem cada vez menores ao longo do tempo, seja para torná-los mais resistentes a forças externas, para direcionar medicamentos para tratar doenças ou para construir estruturas modulares maiores a partir de partes menores.
Os pesquisadores dizem que há muito potencial em seu novo processo: eles podem fazer os robôs girarem e pularem usando as mesmas técnicas, por exemplo. Desde que o robô esteja dentro da linha de visão do laser, ele pode ser manipulado remotamente.
“A robótica é um campo de pesquisa empolgante, e o desenvolvimento de robôs em microescala é um tópico divertido para exploração acadêmica”, disse Rogers.
“Você pode imaginar micro-robôs como agentes para reparar ou montar pequenas estruturas ou máquinas na indústria ou como assistentes cirúrgicos para limpar artérias entupidas, estancar hemorragias internas ou eliminar tumores cancerígenos – tudo em procedimentos minimamente invasivos.”
A pesquisa foi publicada na Science Robotics.